
mechanism is on the core of recent day transformers. However scaling the context window of those transformers was a significant problem, and it nonetheless is although we’re within the period of one million tokens + context window (Qwen 2.5 [1]). There are each appreciable compute and reminiscence sure complexities in these fashions after we scale the context window (A naive Attention Mechanism scales quadratically in each compute and reminiscence necessities). Revisiting Flash Consideration lets us perceive the complexities of optimizing the underlying operations on GPUs and extra importantly provides us a greater grip on pondering what’s subsequent.
Let’s shortly revisit a naive consideration algorithm to see what’s happening.
As you may see if we’re not being cautious then we are going to find yourself materializing a full NxM consideration matrix into the GPU HBM. Which means the reminiscence requirement will go up quadratically to growing context size.
In case you wanna be taught extra concerning the GPU reminiscence hierarchy and its variations, my previous post on Triton is an efficient place to begin. This may even be helpful as we go alongside on this submit after we get to implementing the Flash Attention kernel in triton. The flash attention paper additionally has some actually good introduction to this.
Moreover, after we take a look at the steps concerned in executing this algorithm and its sample of accessing the gradual HBM, (which as defined later within the submit could possibly be a significant bottleneck as properly) we discover just a few issues:
- We have now Q, Ok and V within the HBM initially
- We have to entry Q and Ok initially from the HBM to compute the dot product
- We write the output scores again to the HBM
- We entry it once more to execute the softmax, and optionally for Causal consideration, like within the case of LLMs, we should masks this output earlier than the softmax. The ensuing full consideration matrix is written once more into the HBM
- We entry the HBM once more to execute the ultimate dot product, to get each the eye weights and the Worth matrix to jot down the output again to the gradual GPU reminiscence
I feel you get the purpose. We may neatly learn and write from the HBM to keep away from redundant operations, to make some potential features. That is precisely the first motivation for the unique Flash Consideration algorithm.
Flash Consideration initially got here out in 2022 [2], after which a yr later got here out with some a lot wanted enhancements in 2023 as Flash Consideration v2 [3] and once more in 2024 with further enhancements for Nvidia Hopper and Blackwell GPUs [4] as Flash Consideration v3 [5]. The unique consideration paper recognized that the eye operation remains to be restricted by reminiscence bandwidth quite than compute. (Up to now, there have been makes an attempt to scale back the computation complexity of Consideration from O(N**2) to O(NlogN) and decrease via approximate algorithms)
Flash consideration proposed a fused kernel which does all the above consideration operations in a single go, block-wise, to get the ultimate consideration output with out ever having to comprehend the complete N**2 consideration matrix in reminiscence, making the algorithm considerably sooner. The time period `fused` merely means we mix a number of operations within the GPU SRAM earlier than invoking the a lot slower journey throughout the slower GPU reminiscence, making the algorithm performant. All of the whereas offering the precise consideration output with none approximations.
This lecture, from Stanford CS139, demonstrates brilliantly how we will consider the influence of a properly thought out reminiscence entry sample can have on an algorithm. I extremely advocate you examine this one out in case you haven’t already.
Earlier than we begin diving into flash consideration to name it FA, we could?) in triton there’s something else that I wished to get out of the best way.
Numerical Stability in exponents
Let’s take the instance of FP32 numbers. float32 (normal 32-bit float) makes use of 1 signal bit, 8 exponent bits, and 23 mantissa bits [6]. The most important finite base for the exponent in float32 is 2127≈1.7×1038. Which means after we take a look at exponents, e88 ≈ 1.65×1038, something near 88 (though in actuality can be a lot decrease to maintain it protected) and we’re in hassle as we may simply overflow. Right here’s a very interesting chat with OpenAI o1 shared by people at AllenAI of their OpenInstruct repo. This though is speaking about stabilizing KL Divergence calculations within the setting of RLHF/RL, the concepts translate precisely to exponents as properly. So to cope with the softmax scenario in consideration what we do is the next:

TRICK : Let’s additionally observe the next, in case you do that:

then you may rescale/readjust values with out affecting the ultimate softmax worth. That is actually helpful when you may have an preliminary estimate for the utmost worth, however which may change after we encounter a brand new set of values. I do know I do know, stick with me and let me clarify.
Setting the scene
Let’s take a small detour into matrix multiplication.

This reveals a toy instance of a blocked matrix multiplication besides we’ve got blocks solely on the rows of A (inexperienced) and columns of B (Orange? Beige?). As you may see above the output O1, O2, O3 and O4 are full (these positions want no extra calculations). We simply must fill within the remaining columns within the preliminary rows through the use of the remaining columns of B. Like beneath:

So we will fill these locations within the output with a block of columns from B and a block of rows from A at a time.
Connecting the dots
Once I launched FA, I stated that we by no means must compute the complete consideration matrix and retailer the entire thing. So right here’s what we do:
- Compute a block of the eye matrix utilizing a block of rows from Q and a block of columns from Ok. When you get the partial consideration matrix compute just a few statistics and preserve it within the reminiscence.

I’ve greyed O5 to O12 as a result of we don’t know these values but, as they should come from the next blocks. We then remodel Sb like beneath:


Now you may have setup for a partial softmax

However:
- What if the true most is within the Oi’s which can be but to return?
- The sum remains to be native, so we have to replace this each time we see new Pi’s. We all know learn how to preserve monitor of a sum, however what about rebasing it to the true most?
Recall the trick above. All that we’ve got to do is to maintain a monitor of the utmost values we encounter for every row, and iteratively replace as you see new maximums from the remaining blocks of columns from Ok for a similar set of rows from Q.


We nonetheless don’t wish to write our partial softmax matrix into HBM. We preserve it for the subsequent step.
The ultimate dot product
The final step in our consideration computation is our dot product with V. To begin we’d have initialized a matrix filled with 0’s in our HBM as our output of form NxD. The place N is the variety of Queries as above. We use the identical block measurement for V as we had for Ok besides we will apply it row clever like beneath (The subscripts simply denote that that is solely a block and never the complete matrix)


Discover how we want the eye scores from all of the blocks to get the ultimate product. But when we calculate the native rating and `accumulate` it like how we did to get the precise Ls we will type the complete output on the finish of processing all of the blocks of columns (Okb) for a given row block (Qb).
Placing all of it collectively
Let’s put all these concepts collectively to type the ultimate algorithm

To grasp the notation, _ij implies that it’s the native values for a given block of columns and rows and _i implies it’s for the worldwide output rows and Question blocks. The one half we haven’t defined to this point is the ultimate replace to Oi. That’s the place we use all of the concepts from above to get the precise scaling.
The entire code is out there as a gist here.
Let’s see what these initializations seem like in torch:
def flash_attn_v1(Q, Ok, V, Br, Bc):
"""Flash Consideration V1"""
B, N, D = Q.form
M = Ok.form[1]
Nr = int(np.ceil(N/Br))
Nc = int(np.ceil(N/Bc))
Q = Q.to('cuda')
Ok = Ok.to('cuda')
V = V.to('cuda')
batch_stride = Q.stride(0)
O = torch.zeros_like(Q).to('cuda')
lis = torch.zeros((B, Nr, int(Br)), dtype=torch.float32).to('cuda')
mis = torch.ones((B, Nr, int(Br)), dtype=torch.float32).to('cuda')*-torch.inf
grid = (B, )
flash_attn_v1_kernel[grid](
Q, Ok, V,
N, M, D,
Br, Bc,
Nr, Nc,
batch_stride,
Q.stride(1),
Ok.stride(1),
V.stride(1),
lis, mis,
O,
O.stride(1),
)
return OIf you’re uncertain concerning the launch grid, checkout my introduction to Triton
Take a more in-depth take a look at how we initialized our Ls and Ms. We’re retaining one for every row block of Output/Question, every of measurement Br. There are Nr such blocks in complete.
Within the instance above I used to be merely utilizing Br = 2 and Bc = 2. However within the above code the initialization relies on the system capability. I’ve included the calculation for a T4 GPU. For some other GPU, we have to get the SRAM capability and alter these numbers accordingly. Now for the precise kernel implementation:
# Flash Consideration V1
import triton
import triton.language as tl
import torch
import numpy as np
import pdb
@triton.jit
def flash_attn_v1_kernel(
Q, Ok, V,
N: tl.constexpr, M: tl.constexpr, D: tl.constexpr,
Br: tl.constexpr,
Bc: tl.constexpr,
Nr: tl.constexpr,
Nc: tl.constexpr,
batch_stride: tl.constexpr,
q_rstride: tl.constexpr,
k_rstride: tl.constexpr,
v_rstride: tl.constexpr,
lis, mis,
O,
o_rstride: tl.constexpr):
"""Flash Consideration V1 kernel"""
pid = tl.program_id(0)
for j in vary(Nc):
k_offset = ((tl.arange(0, Bc) + j*Bc) * k_rstride)[:, None] + (tl.arange(0, D))[None, :] + pid * M * D
# Utilizing k_rstride and v_rstride as we're trying on the whole row directly, for every okay v block
v_offset = ((tl.arange(0, Bc) + j*Bc) * v_rstride)[:, None] + (tl.arange(0, D))[None, :] + pid * M * D
k_mask = k_offset < (pid + 1) * M*D
v_mask = v_offset < (pid + 1) * M*D
k_load = tl.load(Ok + k_offset, masks=k_mask, different=0)
v_load = tl.load(V + v_offset, masks=v_mask, different=0)
for i in vary(Nr):
q_offset = ((tl.arange(0, Br) + i*Br) * q_rstride)[:, None] + (tl.arange(0, D))[None, :] + pid * N * D
q_mask = q_offset < (pid + 1) * N*D
q_load = tl.load(Q + q_offset, masks=q_mask, different=0)
# Compute consideration
s_ij = tl.dot(q_load, tl.trans(k_load))
m_ij = tl.max(s_ij, axis=1, keep_dims=True)
p_ij = tl.exp(s_ij - m_ij)
l_ij = tl.sum(p_ij, axis=1, keep_dims=True)
ml_offset = tl.arange(0, Br) + Br * i + pid * Nr * Br
m = tl.load(mis + ml_offset)[:, None]
l = tl.load(lis + ml_offset)[:, None]
m_new = tl.the place(m < m_ij, m_ij, m)
l_new = tl.exp(m - m_new) * l + tl.exp(m_ij - m_new) * l_ij
o_ij = tl.dot(p_ij, v_load)
output_offset = ((tl.arange(0, Br) + i*Br) * o_rstride)[:, None] + (tl.arange(0, D))[None, :] + pid * N * D
output_mask = output_offset < (pid + 1) * N*D
o_current = tl.load(O + output_offset, masks=output_mask)
o_new = (1/l_new) * (l * tl.exp(m - m_new) * o_current + tl.exp(m_ij - m_new) * o_ij)
tl.retailer(O + output_offset, o_new, masks=output_mask)
tl.retailer(mis + ml_offset, tl.reshape(m_new, (Br,)))
tl.retailer(lis + ml_offset, tl.reshape(l_new, (Br,)))Let’s perceive whats occurring right here:
- Create 1 kernel for every NxD matrix within the batch. In actuality we’d have another dimension to parallelize throughout, the top dimension. However for understanding the implementation I feel this is able to suffice.
- In every kernel we do the next:
- For every block of columns in Ok and V we load up the related a part of the matrix (Bc x D) into the GPU SRAM (Present complete SRAM utilization = 2BcD). This stays within the SRAM until we’re completed with all of the row blocks
- For every row block of Q, we load the block onto SRAM as properly (Present complete SRAM Utilization = 2BcD + BrD)
- On chip we compute the dot product (sij), compute the native row-maxes (mij), the exp (pij), and the expsum (lij)
- We load up the working stats for the ith row block. Two vectors of measurement Br x 1, which denotes the present world row-maxes (mi) and the expsum (li). (Present SRAM utilization: 2BcD + BrD + 2Br)
- We get the brand new estimates for the worldwide mi and li.
- We load the a part of the output for this block of Q and replace it utilizing the brand new working stats and the exponent trick, we then write this again into the HBM. (Present SRAM utilization: 2BcD + 2BrD + 2Br)
- We write the up to date working stats additionally into the HBM.
- For a matrix of any measurement, aka any context size, at a time we are going to by no means materialize the complete consideration matrix, solely part of it at all times.
- We managed to fuse collectively all of the ops right into a single kernel, lowering HBM entry significantly.
Ultimate SRAM utilization stands though at 4BD + 2B, the place B was initially calculated as M/4d the place M is the SRAM capability. Unsure if am lacking one thing right here. Please remark if you realize why that is the case!
Block Sparse Consideration and V2 and V3
I’ll preserve this quick as these variations preserve the core concept however discovered higher and higher methods to do the identical.
For Block Sparse Consideration,
- Contemplate we had masks for every block like within the case of causal consideration. If for a given block we’ve got the masks all set to zero then we will merely skip your complete block with out computing something actually. Saving FLOPs. That is the place the most important features have been seen. To place this into perspective, within the case of BERT pre-training the algorithm will get a 15% increase over the perfect performing coaching setup on the time, whereas for GPT-2 we get a 3x over huggingface coaching implementation and ~ 2x over a Megatron setup.

2. You possibly can actually get the identical efficiency in GPT2 in a fraction of the time, actually shaving off days from the coaching run, which is superior!
In V2:
- Discover how at the moment we will solely do parallelization on the batch and head dimension. However in case you merely simply flip the order to have a look at all of the column blocks for a given row block then we get the next benefits:
- Every row block turns into embarrassingly parallel. How you realize that is by trying on the illustrations above. You want all of the column blocks for a given row block to totally type the eye output. In case you have been to run all of the column blocks in parallel, you’ll find yourself with a race situation that can attempt to replace the identical rows of the output on the identical time. However not in case you do it the opposite manner round. Though there are atomic add operators in triton which may assist, they might probably set us again.
- We will keep away from hitting the HBM to get the worldwide Ms and Ls. We will initialize one on the chip for every kernel.
- Additionally we wouldn’t have to scale all of the output replace phrases with the brand new estimate of L. We will simply compute stuff with out dividing by L and on the finish of all of the column blocks, merely divide the output with the most recent estimate of L, saving some FLOPS once more!
- A lot of the advance additionally comes within the type of the backward kernel. I’m omitting all of the backward kernels from this. However they’re a enjoyable train to try to implement, though they’re considerably extra advanced.
Listed below are some benchmarks:
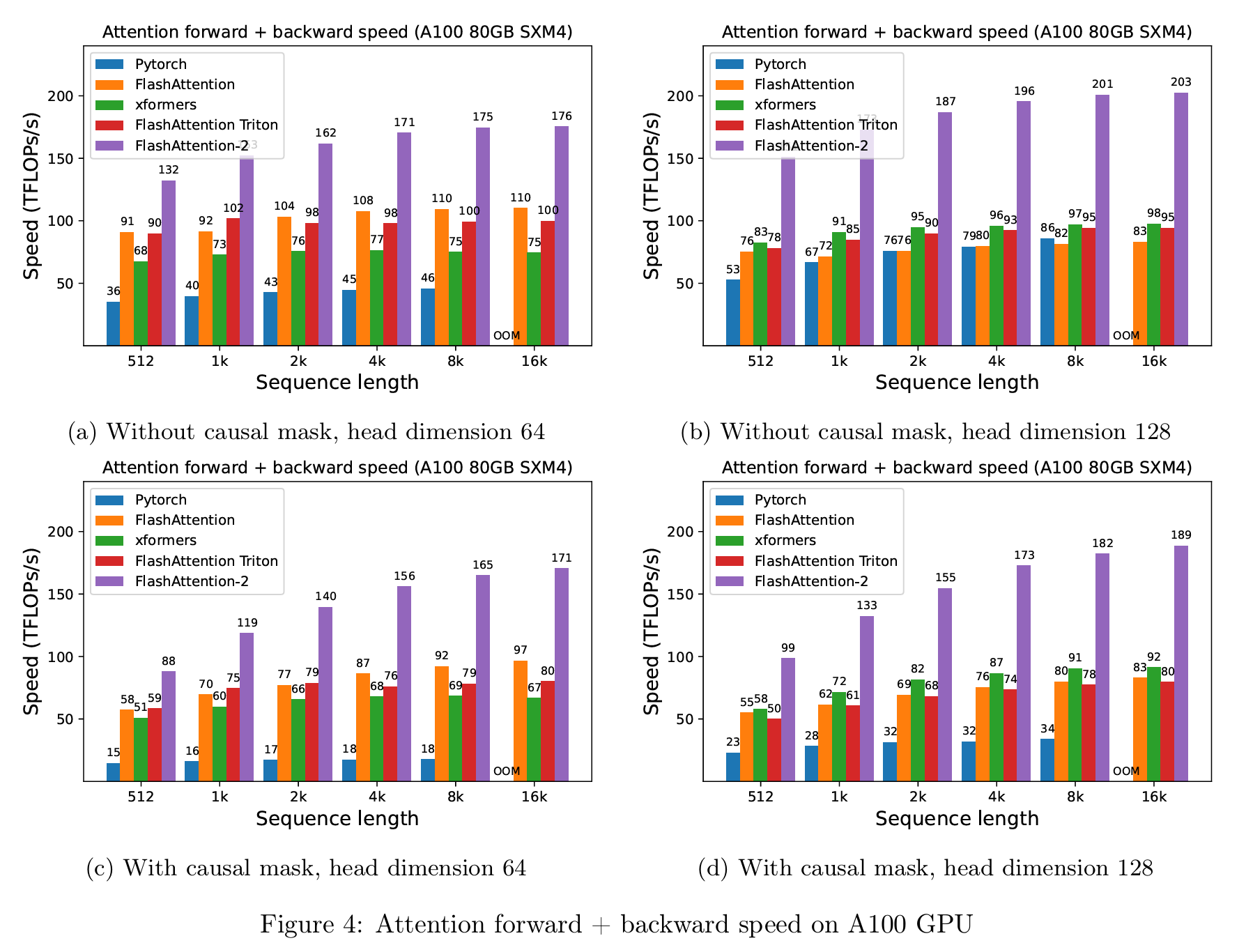
The precise implementations of those kernels must take note of numerous nuances that we encounter in the true world. I’ve tried to maintain it easy. However do check them out here.
Extra just lately in V3:
- Newer GPUs, particularly the Hopper and Blackwell GPUs, have low precision modes (FP8 in Hopper and GP4 in Blackwell), which may double and quadruple the throughput for a similar energy and chip space and extra specialised GEMM (Common Matrix Multiply) kernels, which the earlier model of the algorithm fails to capitalize on. It is because there are numerous operations that are non-GEMM, like softmax, which reduces the utilization of those specialised GPU kernels.
- The FA v1 and v2 are basically synchronous. Recall within the v2 description I discussed that we’re restricted when column blocks attempt to write to the identical output pointers, or when we’ve got to go step-by-step utilizing the output from the earlier steps. Nicely these trendy GPUs could make use particular directions to interrupt this synchrony.
We overlap the comparatively low-throughput non-GEMM operations concerned in softmax, similar to floating level multiply-add and exponential, with the asynchronous WGMMA directions for GEMM. As a part of this, we rework the FlashAttention-2 algorithm to bypass sure sequential dependencies between softmax and the GEMMs. For instance, within the 2-stage model of our algorithm, whereas softmax executes on one block of the scores matrix, WGMMA executes within the asynchronous proxy to compute the subsequent block.
Flash Consideration v3, Shah et.al
- In addition they tailored the algorithm to focus on these specialised low precision Tensor cores on these new units, considerably growing the FLOPs.
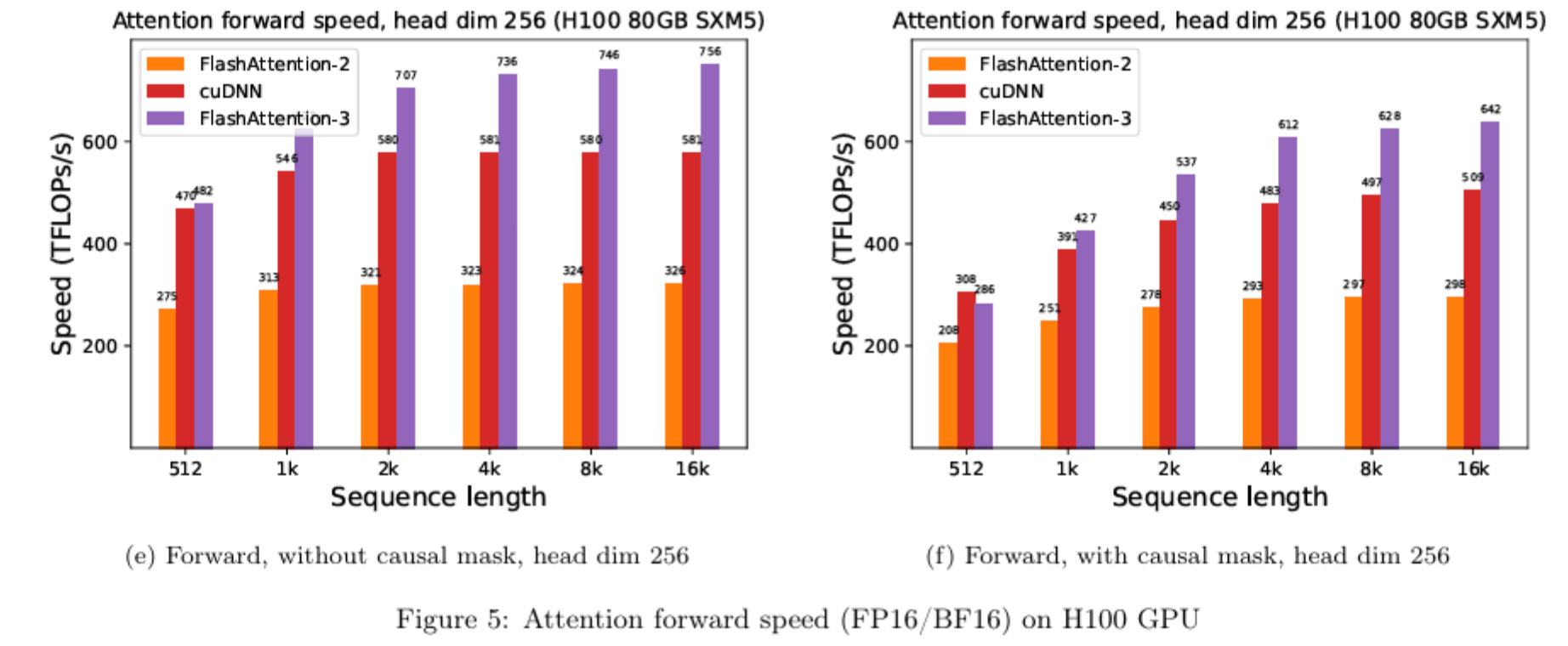
Some extra benchmarks:
Conclusion
There’s a lot to admire of their work right here. The ground for this technical talent stage usually appeared excessive owing to the low stage particulars. However hopefully instruments like Triton may change the sport and get extra folks into this! The long run is vibrant.
References
[1] Qwen 2.5-7B-Instruct-1M Huggingface Model Page
[2] Tri Dao, Daniel Y. Fu, Stefano Ermon, Atri Rudra, and Christopher Re, FlashAttention: Fast and Memory-Efficient Exact Attention with IO-Awareness
[3] Tri Dao, FlashAttention-2: Faster Attention with Better Parallelism and Work Partitioning
[4] NVIDIA Hopper Architecture Page
[5] Jay Shah, Ganesh Bikshandi, Ying Zhang, Vijay Thakkar, Pradeep Ramani, Tri Dao, FlashAttention-3: Fast and Accurate Attention with Asynchrony and Low-precision